Home
Tutorials
Old Tutorials
Path visualization in RViz
Subscribing to Path
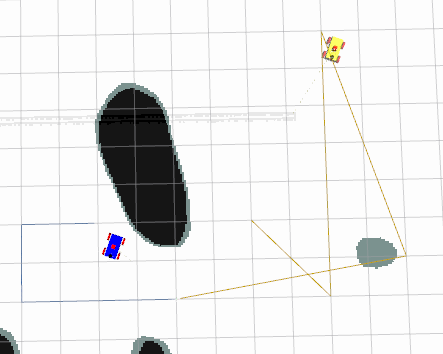
In the previous section we have already used a nice feature of an RViz: visualizing of a subscription to a Path message. First, we publish the Path:
And then, in RViz, we select Add - By topic - ... and voila!
Note that this process is very "non-dynamic": if we have two paths, we have to manually add them to RViz config file (by adding them using UI of RViz, and then saving).
Markers in RViz
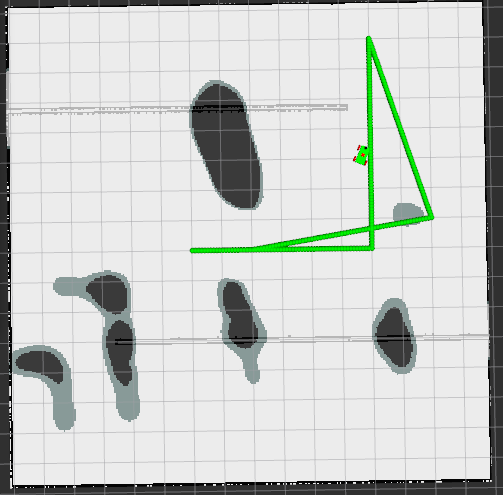
Marker is a tiny sphere, arrow, line fragment and so on. By displaying multiple markers, we can plot a line:
Now, let's say we want to "plot" the entire path using this markers:
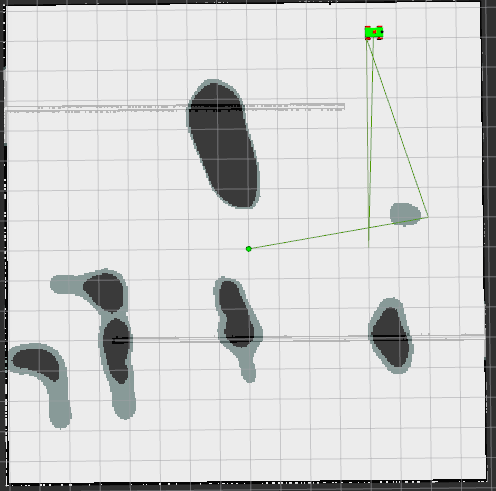
As you can guess, to see this path in RViz, we have to,
in RViz, add the topic for visualization. In case of a
single robot project, it is going to be "/markers_path_array",
In case of a multi robot project, "robot1/markers_path_array"
or "robot2/markers_path_array".