Home
Tutorials
Old Tutorials
Meshes
meshes folder contains STL files that we use to create a reasonably nice looking robotic arm. In our project, only 3 meshes are used, one for the "base" of the gripper and another two for the left and right fingers. An important thing to learn here is that is is not practical to design a "real" gripper, as we need a simple and fast running simulation. As long as it uses same set of signals as the real one (I used a linear actuator in this example), it is ok to simplify it.
We could, of course, design the "propper" gripper, like this one:
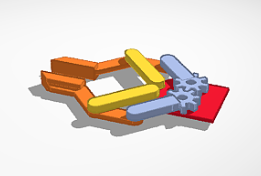
... but this will only make simulation slower, with no added benefits.
To create meshes, I am going to use Tinkercad, the best online STL editor I know of. Here is the base_0 model in Tinkercad.
