Home
Tutorials
Robotics: ROS2
Differential Drive Robot
ROS2 Navigation: Basics
Navigation: Sensors
Mapping and Localization
Navigation: Improved project
Navigation: Examples
Waypoint Follower
Navigating with Keepout Zones
Navigating along given path
Go to battery charger
Dock to battery charger - 1
Dock to battery charger - 2
Dock to battery charger - 3
Multiple Robots
Multiple Robots: Traditional approach
Multiple Robots: Navigation
Custom Nav Algorithms
Localization and Custom Path
Lines and Markers
Map Editing Utility
Building 2.5d world
Textured 3d mesh from topo map
Adding roads to 3d mesh
First Person View 2.5D world navigation
Navigation in 2.5D world
Kalman Filter
Using Kalman Filter for ROS2 Localization
Simulation with slippage and drift
Sensor Fusion
Sensor Fusion and Localization in 3d
Navigation in 2.5D (part 2)
Aruco markers as 2.5d Landmarks
Path Planners in 2.5d world (1)
Robotic Arm
6 DOF Manipulator and Controllers
Gripper
Fixing Gazebo Gripper
Robotics: Hardware
ESP8266
Relays and solenoids
Servo motors
L293D motor driver
Robotics: My Robots
Robotic Spider: Complete Guide
Launch file
arm_sim.launch.py is the main (and only so far) launch file of the project. It is rather simple: as this is the first project in "robotic arm" series, I have removed all command line parameters, using hardcoded values to make it simpler.
Running this launch file with joint_state_publisher_gui uncommented, will produce the following:
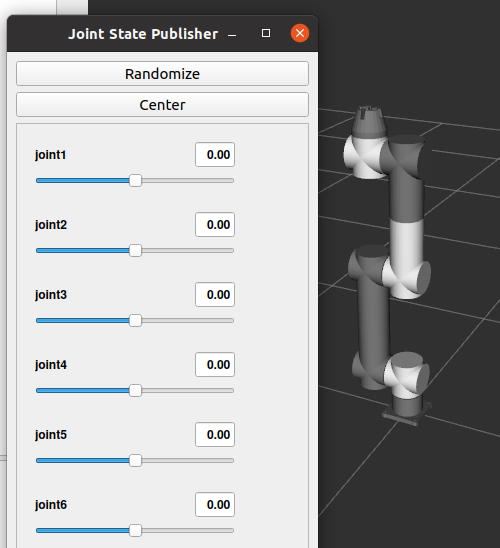
With joint_state_publisher_gui commented out, the result will be the same, of course, except the window with controls will not show up.