Home
Tutorials
Spider: Mechanics
I used the robotic spider from thingiverse as a starting point (mechanics only, NOT software or electronics) and modified it using a wonderful Tinkercad online CAD. The modification made it screwless (glue and click-fit) and size was also changed to fit my PCB.
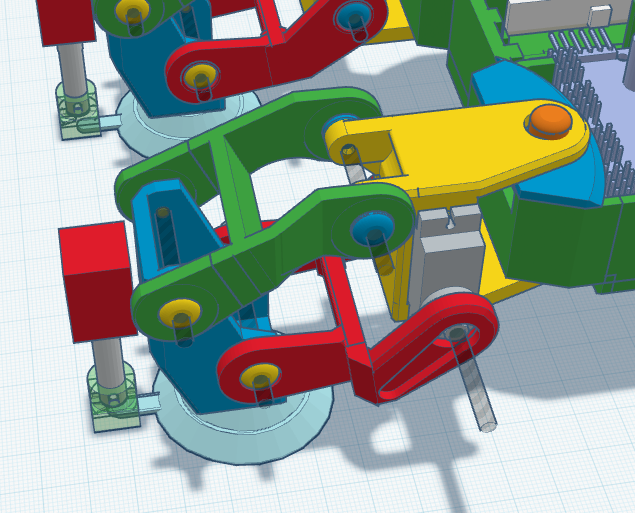
A good thing about this design is, legs go up and down while the last part of a leg remains vertical, it goesn't make any difference from the practical point, but looks more professional.
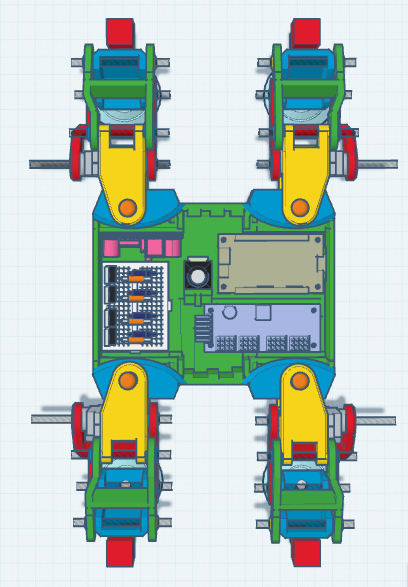
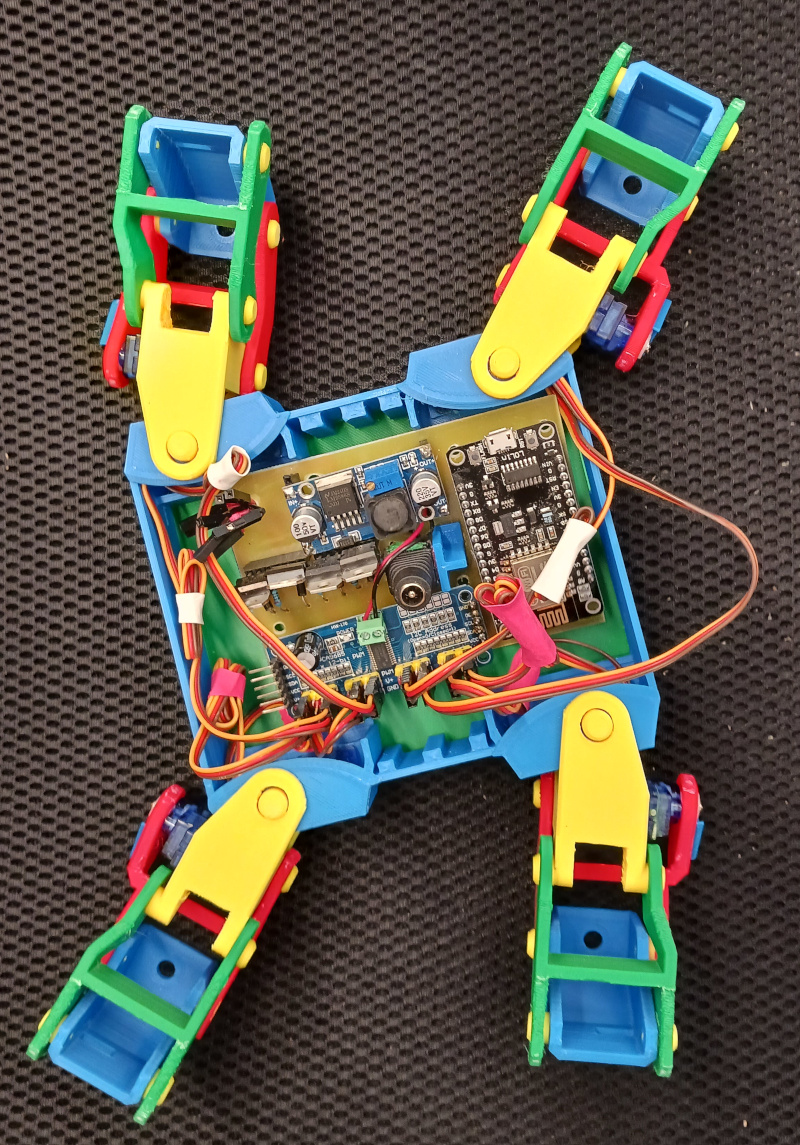
The electronics at the picture above has little with reality: it is a prototype that uses breadboard instead of PCB. So ignore the electronics for now, I will address it later.
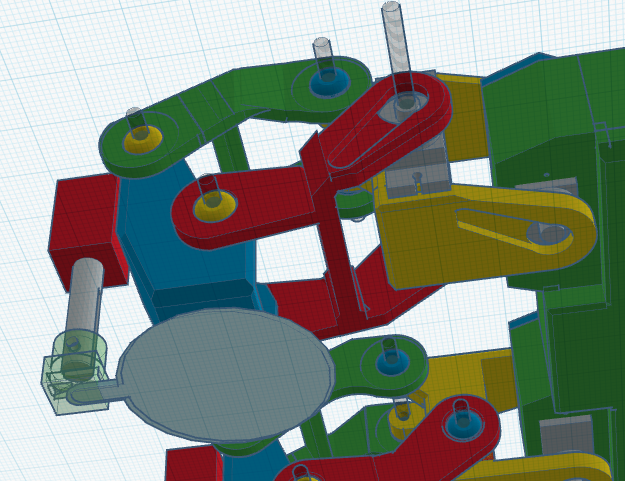
Also, ignore solenoids and vacuum caps:
Note that in this design (I am going to change it later) I am using barrel connector to plug in the power source. On the following image, the connector is located in the center of PCB:
Which means that robot is not that mobile after all: it can not walk away from power source. As I said, I will address this later, briefly: we need to find batteries we want to use and to (probably) change step down convertor to step up. The later in case we do not want to use solenoids. If we do want solenoids, we will have to either find a 5V battery and use step-up to feed solenoids, or we can have something like 3V power source and use a single step up for solenoids.
Note that some power banks can provide you with 5V, so we can use such power bank and a step up convertor. Or no convertor at all, if we do not use solenoids.
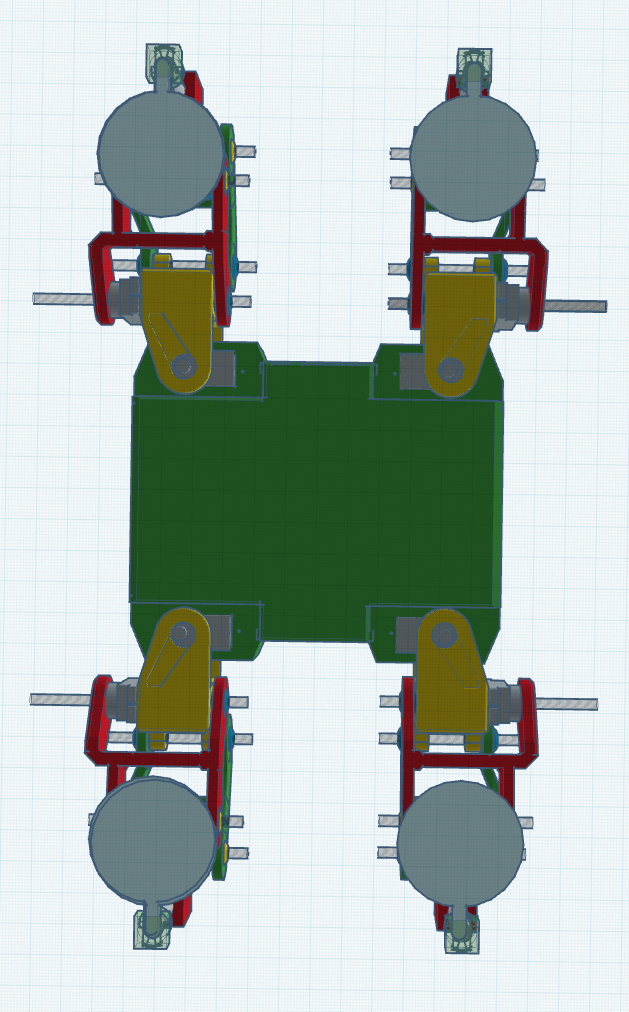
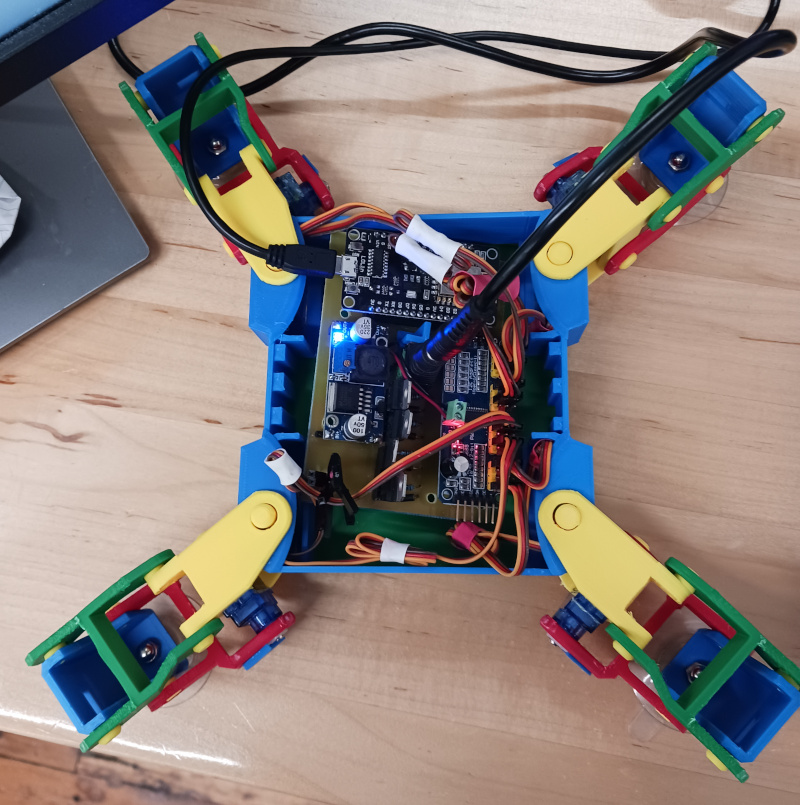
For now, I am going to use a simple trick to make sure the robot doesn't move while I am testing the software: I put it on a box. Notice two cables attached: one is for transfering software to NodeMCU, and one for providing power for motors.
Motors are either screwed or glued to the body. Legs are assembled by click-fit, note that to connect parts, sometimes, you have to click-fit 4 pins (to at the tor, two at the bottom) simultaneously. It seems impossible; what you need to do is to place pins on one side to the holes, and click-fit 2 opposite pins at once.
As the robot does not have vacuum caps (and will not have them any times soon) I am going to replace them with same yellow pins I use to connect legs together. They will be glued to legs' bottom.