Printed High-load Robotic Shoulder.
(C) SnowCron.com
In the net, we can easily find plenty of robotic arms, some of them are plain ugly, some strikingly beautiful:

So why do we need an article about another one? And what is this "shoulder" thing? And what does an author mean by "High-Load"?
Well, all of us, Star Wars funs, know that robots are different, built for different purposes. So, before enjoying the iPhone-like smooth design, we should ask ourselves some questions, like...
When cleaning my appartment, will it be able to lift a 10 liters basket full of water? And by lifting, I mean lifting it on an extended hand, with leverage of approximately 1 meter, give or take.
Another example from the net, to illustrate the problem:
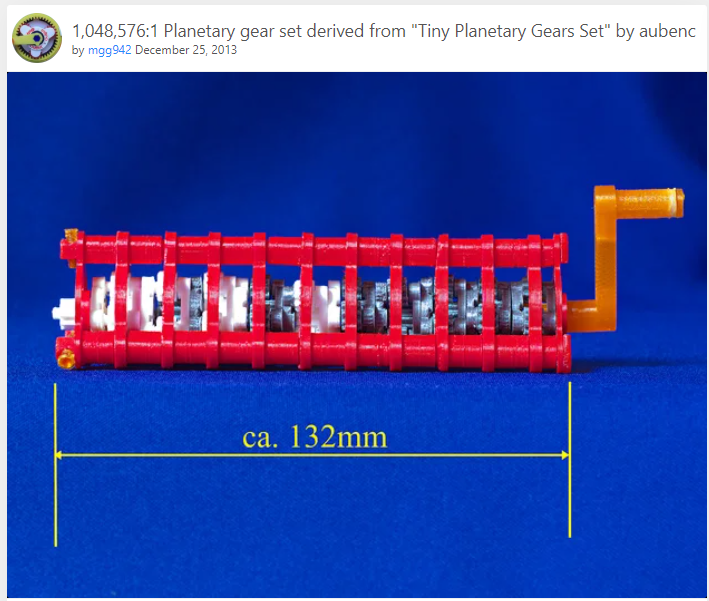
So, we have a 1,048,576:1 reductor. Yes, it will spin slower as promised. But will it provide 1,048,576 higher torque? The answer is NO. Plastic gears will break, that's all.
Let's do some calculations.
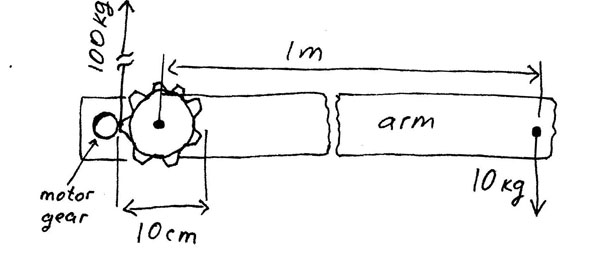
With elementary school level geometry, we came to an unsettiling thought that a tiny piece of cheap printed plastic 4mm thich gear should hold 100kg load and a motor (most likely NEMA-17, but maybe even a cheaper one) should provide enough torque to counteract it.
Well, first of all, it will break, and second, it will not spin under that load, or even spin in the opposite direction.
Oh, also we have an "arm" itself, that should not bend. Or swing from side to side.
Conclusion: most online solutions work fine either if you need to move around something as heavy as a matchbox, or if you have access to high-quality steel parts.
Therefore, the design should be altered to be more... solid. High load, so to speak.
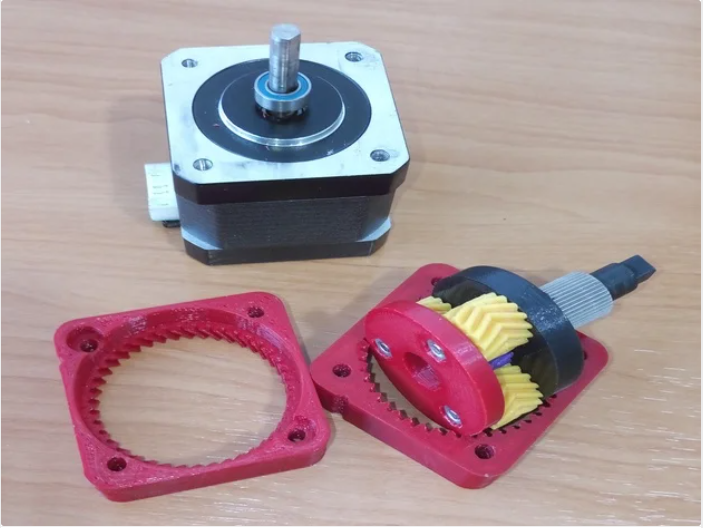
Another problem with robotic arms we can find on a thingiverse.com (just as an example) is that they do not pay enough attention to a rotation, which is very important, as we need to be able to move our imaginary match box from left to right, not just up and down. And here is a problem:

On the picture above, we have a "rotation table" commonly used in low load robotic arms. As we apply force to the arm (lifting something heavy), that force tries to flip the gear. And the part that counteracts it is a bearing (small gray cylinter on top of gear). Unfortunately, bearings are not designed to work against force that acts along its axe! It will wear off and break.
Traditionally, this problem is solved with conic bearings, but they are expensive. Plus, for a small robotic arm you would probably want small conic bearings, which are not that durable against 100 kg load.
Anyway, in this article I am going to look at few common designs, their flaws and advantages. We will only focus on horizontal rotation (a shoulder, so to speak) leaving "robotic arm" to another article.
Reinventing the bearing
Here is a rather standard solution, you can find it mostly in some consumer devices and toys. But it is good enough to work in large machinery as well. Basically, we are building our own bearing with three rolls, supporting the platform. A complete design should have another ring with rolls on top, enveloping the gear in some kind of a sandwich, making sure it can apply the necessary pressure up or down.
Of course, we can move rolls inside the ring, if we choose to.
An obvious disadvantage is that we need to use 6 rolls, making the design complex. The gear will have to have a chamfer for rolls, which makes it harder to pring and reduces the thickness of a gear (we should always keep in mind that the gear should be strong enough for the above mentioned 100 kg). Rolls will interact with edges of a chamfer, which, under heavy load) will destroy them eventually.
Alternatively, gear can be placed on an axe, and ring attached to it as well. in that case chamfer is not necessary, bur design will become even more complex. Keep in mind that the image above only shows part of a design. We need to make sure we can assemble it. So we need to connect the disk at the bottom with disk on top (not shown, together with the second ring with rolls, it is symmetric to disc and rolls at the bottom), the connector should - yes, again! - be able to hold 100 kg load and motor fits in all that somehow.
Nevertheless, it can be done. Later we'll see how to reduce this complexity to something more manageable.
Herringbone
Another design you can see often uses planetary gears, particularly, herringbone gears. As for "planetary" part: this is a reductor. If you connect your motor to the central gear, it will apply torque to 3 (sometimes 4) gears around it, and those make the outer gear rotate around all center gears. So there is almost no difference between the design with two gears, small and large, and design with five gears, four small and one large and inverted. Why bother then?
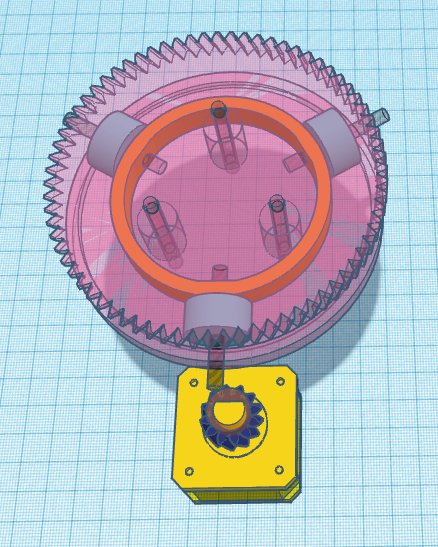
First of all, planetary gears allow you to place motor in the center, just for the sake of aesthetics. If you are planning to sell your design, it can be important. Second... Take a look at 3 small gears that are located around the one in the middle. They do not move. I mean, they do rotate around their axes, but those axes are attached to the outer shell of a device:
This is how the rotation is passed to the outer ring: if middle three gears rotate but remain in place, then the outer ring should move instead.
However, this situation has an additional bonus: axes holding 3 middle gears in place will take the load! Which gives us 3 elements to resist the force, instead of one in the center. Even in a printed joint, we can make those axes from metal (rods or bolts), making it stronger than cheap plastic.

Ok, we are done with "planetary" part, let's talk about the "herringbone" one. There are two advantages in using herringbones. Firsrt, as the contact area between two gears is longer, it can handle higher load. That's what we need. Second, you can not move one gear up relative to another.
Once again: herringbone gears, once in place, will not fall off, even without "side walls". They fit in place and can resist some pressure along the axes: remember what happens when we try lifting the weight with our robotic arm? This pressure. Not a lot of it, at least I wouldn't count on it holding against 10 liters basket at one meter leverage, but still something.
This system, of course, has its disadvantages. They all do.
First of all, assembling a herringbone is a pain. Most 3d printers are not precise enough to pring a "one piece" assembly and most designs at thingiverse are one-piece assemblies. And if you cannot print it, you should put it together and use glue/bolts, because not only this thing resists attempts to break it once assembled, but it is equally hard to push parts in place. Sometimes people use the ring with a cut in it, that they use to create an opening and stick in the small gears; then they put the ring inside another (solid) ring to cover the cut.
One obvious disadvantage of this approach is in the fact that we are going to attach THICK leverage (a cylindrical rod on an image below) to a thin ring:
This can be fixed by making the ring thicker, but still...
In all aspects, herringbone planetary assembly acts as a bearing, and an additional advantage is, this is a large bearing. So it can handle some heavy load.
However, as we use inverted ring, its diameter is smaller, so it is not as good as a reductor as a straightforward two gears design. Which is fine as most likely we'll need additional reduction anyway. Of course, if for some reason we want to use the outer motor gear, we can do it. Remember, I said that all this thing is nothing but a bearing? Here we use it as such, leaving the reduction part to a "two gears" design:
Just to clarify, we simply added an outer large gear, and mover the motor with small gear outside.
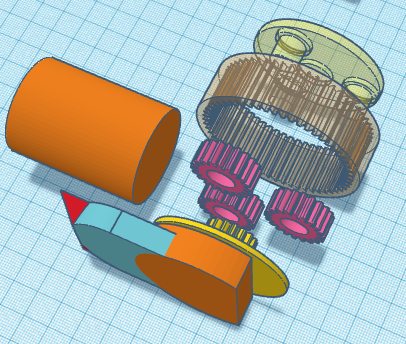
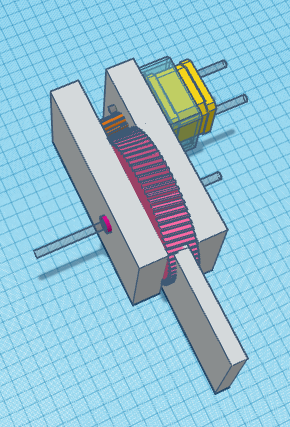
Two gears, plain and simple
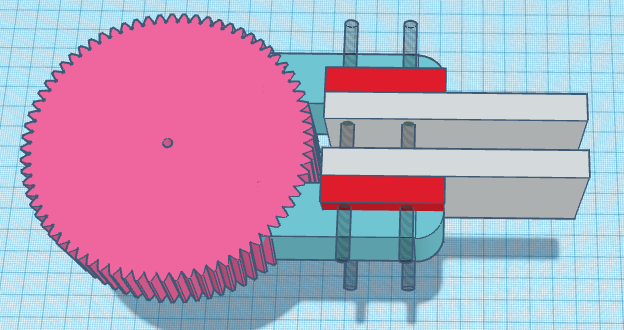
We have mentioned "two gears" design couple of times already, let's build one that is more or less usable. This is just the first approximation, we'll return to this topic later.
This is a VERY simple design (and for the "shoulder" it should be turned 90 degrees). We have a motor, or a motor with additional reductor, and two gears. It all is embraced in a solid frame... that's it. Can it be so simple? Of course not!
First of all, the large gear has an axe, shown as a transparent 3mm rod. Will it work? No. A 3mm steel rod at a load we want, in the exact ent of a leverage, will cut the plastic, breaking it. We need a bearing.
Now, earlier we mentioned that bearing can handle load directer "from center towards outer ring", but not one along its axe. In this design the problem is kind of solved by using a sandwich-like structure: holter-gear-holder. We assume that the rotation speed is slow (it is an arm, not a turbine) and torque is high, so we don't care about friction. We just squeeze the gear from both sides, and if the force is applied, the thick plates of a holder will absorb it, leaving the bearing unaffected.
Can that work? If the design is precise enough, then yes. If the bearing gets its share of pressure BEFORE the holder, then no.
In any case, next question an engineed should ask, is: do we need that bearing on the first place? And if so, can we replace it with something more suitable?
The answer is yes, and we'll return to this topic later.
Using Steel Cables
Our next candidate looks like a training apparatus. Instead of using gears, we use cables. By the way, this is how our body works... Except we do not use motors, but that's ok. Or you can think of it as of some kind of a construction machine:

Let's start with advantages. There is one: we don't need to place motors at each consequent joint. It means that you can place all motors (one per each joint) at the shoulder, and make the rest of the arm electronics-free. Just think of your rofor doing layndry to see all advantages of it: your design is now (almost) water-proof!
Disadvantages are present as well. First, you need large joints, as the smaller joint is, or, to put it differently, the closer the point where cable is attached, to the point of rotation, the more force you should supply. Just the leverage.
Second, the machine on the picture above only lifts the excavator bucket. The opposite part of job does the gravity. When building an arm, we need to be able to apply force in both directions, so we need two cables per each joint.
Third, cables do stretch, so precision will be less than with gears. More than that: we need to make sure "bending" and "unbending" cables work in a perfect sync, and all this keeping in mind the reversible (under load) and irreversible (with time) stretching.
Finally, in a "flat" arm, cables are parallel. But if you add "shoulder", they will have to bend around at arbitrary angle... Which doesn't make designer's job any easier.
All that said, it is possible to design such an arm, just it is not that easy. Oh, and one more thing: all that was said about loading bearings in a way they are not supposed to be loaded - holds.
As a good place to start, we probably shouldn't use steel cables in a shoulder design, even if we use them in the rest of our robotic arm.
Steel, beskar and other advanced materials
As I complained so many times about plastic being weak, shouldn'tI consider other materials? This is something a garage robotics expert should always keep in mind: there are some cheap and convenient materials available. Let's take a look at aluminum profile.
This is a small enchancement to the large gear: we are going to male the "bones" of our arm of 40x10x... mm profile. We can now be sure that our 1 meter long arm will not swing due to flexibility, and will not break due to weakness of plastic.
The next obvious step is to overwrite the ugly desigh by sticking the profile right into the gear (we can use bolts to make sure it doesn't come out:
Note that profile is thinner than the gear. We can also design it the other way around.
Junk yard as a resource
So far, our main concern was the fact that when our robotic arm is lifting the weight, we need to somehow counteract the leveraged force. Well, if you look around, you will see an example of a device that has this problem resolver: I am talking about the doors. Door hinges hold door against its own weight, and they are located at the end of a large leverage, right? So let's use this approach.
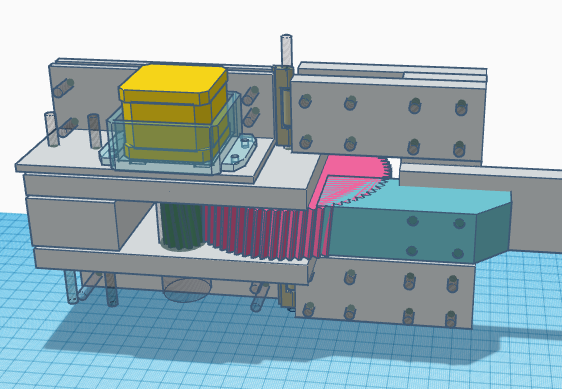
Instead of Star Wars, our first design resembles some kind of steam punk, but the idea is clear: wherever possible, we used profile. Plus, on top and bottom of large gear's axe, you can see small grey part: a 40mm door hinge. Well, actually, you can see only a top obe, the one on the botton is not visible at this angle.
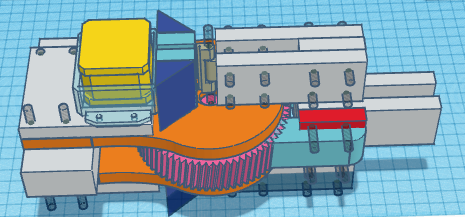
Obviously, blue triangular parts are going to break first, so let's fantacise an even more steampunk one:
Now, this design is still far from final (look at the motor holder!), but it will do as a concept.
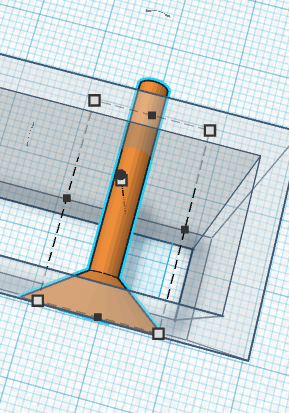
Let's improve the design by sacrifying the symmetry: motor moved off the middle line, instead, we have more solid body. Also, we use plastic "nose" to connect the gear with the "bone".
What else can replace the bearing?
So far we used rolls, planetary gears and door hinges. Anything else?
Sleeve (hub).

This funny looking dewice can handle high load (though as it is small, plastic around it still can break). We can use it to hold the large gear and we even can put it intu aluminum profile, not plastic.

Disadvantages of this approach: we have to use steel rod as an axe for the gear, and, as was mentioned, there can be some problems with plastic. Using profile does solve the problem, but only part of it, as making hole in profile and applying force to it is not the best idea. Profile metal is about 1 - 1.5 mm thick, so all pressure will be on this metal and on 1 - 1.5 mm (x2, of course) of a sleeve. So it better be strong.
Anyway, we can place the sleeve either in gear, or in holder (two sleeves then).
Obviously, second solution is better (can you figure out why?)
Few more twists
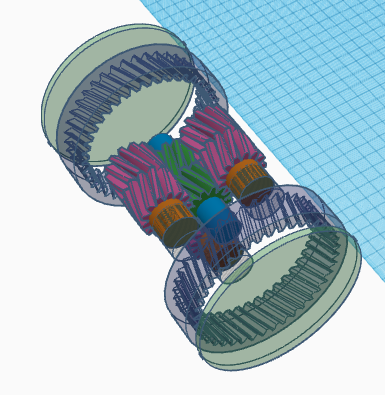
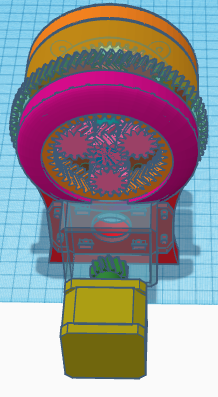
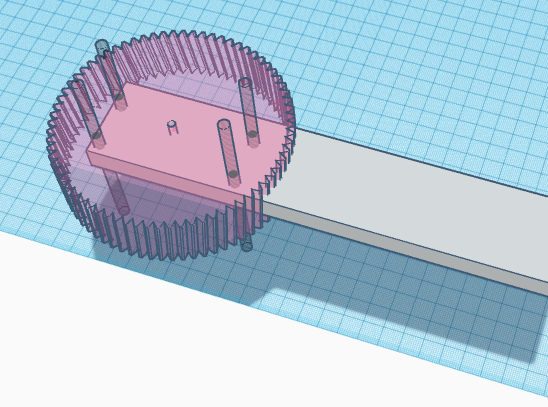
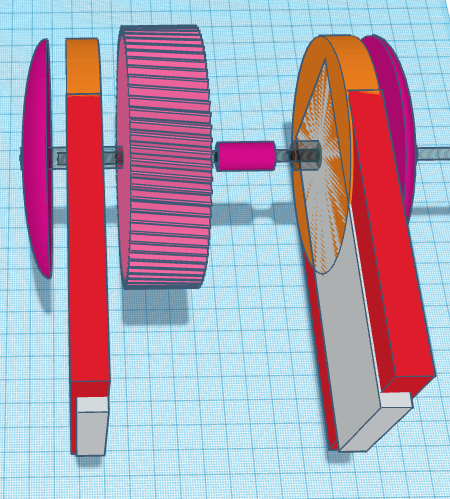
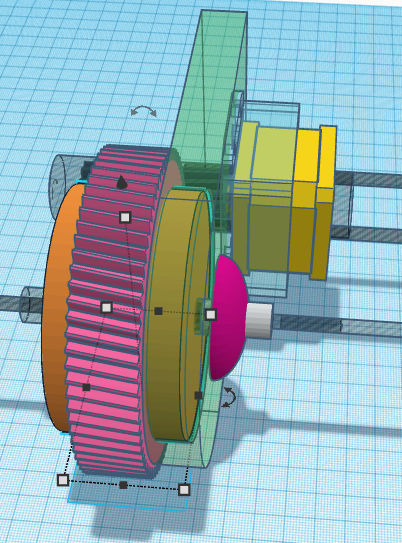
Now, we said "bearing" so many times, but in most designs there are two bearings, one on each side of a gear. And as we mentioned that "herringbone planetary assembly works just like a bearing", here is another design. By the way, earlier I have mentioned that with planetary approach "we are going to attach THICK leverage to a thin ring"; here is a cure... sort of. So, in the following design we have two sets of planetary gears, holding an ordinary large gear:

This gear does have a hole in it, but it is thicker than "clean" planetary design. We can have the rest of a design same as in "two gears" one: holder, gripping the gear from both sides and 3 axes (of 3 small planetary gears) fixed in it. That will work, but...
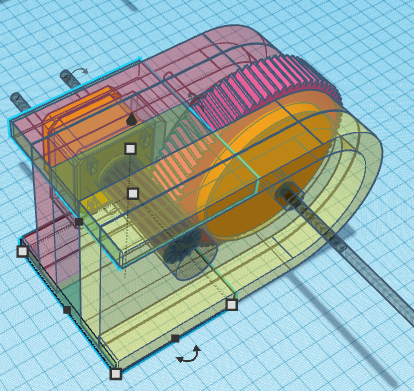
If you ask any engineer to list types of bearings, one of the positions in the list will be a sleeve bearing. As a mater of fact, we have already used off-the-shelf sleeves; this time, let's print one.
On the image above you can see gear and a half (second half isn't shown) of a holder. The gear has a large disk on its side and a holder has a hole for that disk. Together they form a sleeve, but a rather large one.
Same approach can be used in case of a planetary gears, but it will require using thin inverted gear; it is ok if you work with steel, but will likely break if you deal with plastic.
Sleeve like that doesn't really need to be "closed":

However, this design is "thin" and will likely break. To make the holder stronger, we can either make it thicker, or introduce stiffeners:

Same approach can, of course, be used with "plain two gears" design:

This design is rigid enough, so it can probably work even without aluminum additions.
Which one shall we choose?
When choosing the proper design, we need to keep in mind few criteria, and even then, at the end we'll probably need to throw a coin or two.
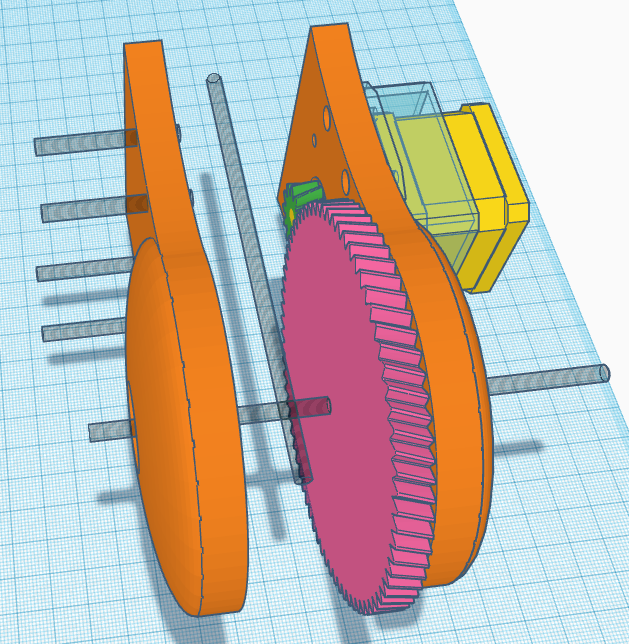
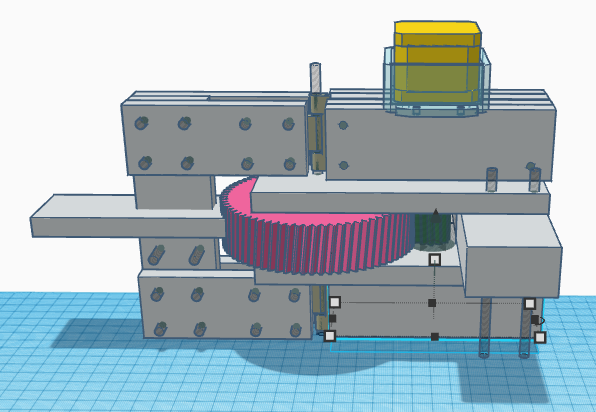
First of all, how rigid should it be? Or how rigid can it be made with minimal efforts? For example, the last design above can be reinforced additionally, by adding sides to the holder:
Nothing comes for free, and adding those extra walls will restrict the angle robotic joint can turn at. But it is still definitely sufficient for the "shoulder" and most likely is sufficient for "arm" as well.
If we want our "shoulder" to be as rigid as possible, we should go for aluminum profile design:
This design is simple though not attractive at all. You can add plastic cover to it, to make it look futuristic.
Let's walk over problems this "simple" solution presents.
1. Gear friction against aluminum profile.
As a sideways force is applied, side of a gear will contact the aluminum, and it will scratch it.
This is a problem of all designs with a single axe in the center of a large gear, but we can probably ignore it in case plastic
slides against plastic. A solution would be using rolls (the first design) or planetary gears (3 axes, not in center, so leverage is
smaller). A pronted "large sleeve" solves it, too, but we absolutely can not have plastic sleeve and metal body in the same design.
2. The aluminum "bone" is stuck in the gear: will it crack it?
We have no choice really, but to pring the large gear flat, along its axe. This produces solid result, but layers of the pring are
parallel to the sides of a gear. Now we stuck an aluminum profile in it, tirned it to the side (layers are horizontal now)
and applied the forve:

As you can see on the picture above, the layers can separate, as the profile acts as a leverage.
This is a common problem of all designs, the gear-to-bone connection should be strong enough to sustain the above mentioned 100 kg. A solution is obvious: we need to put bolts through the gear and profile and screw them together. The problem is obvious too: heads of the bolts on one side and nuts on the other side will scratch the holder. So instead of "plane against plane" we suddenly get "plane against bolts" friction, which is inacceptable.
Part of this problem can be solved by making sure heads of the bolts is sunk in the profile:
But it will not work with nuts on the opposite side. There are solutions for it, like screwing the bolt in the profile itself, but we are not going to do it. Luckily, the gear will most likely hold.
The axe and sleeve for it. If we put sleeve through aluminum profile, it meand the contact area is going to be small: profile is empty inside! It is strong enough and will most likely hold, but... most likely.
Everything else we have missed.
There are many other problems in our designs. Just to list few:
1. Small gear contacts large gear, holding, as I stated earlier, 100 kg. We can solve this problem by making gears thicker. 1 cm, 2 cm... We can use herringbone gears, too, they are about 1.5 times stronger.
2. Axe, of a small gear. It holds the weight, right? 100 kg. We can use sleeves, but we probably need them on both sides, unless we are sure the bearing of the motor can hold the load (normally it can not).
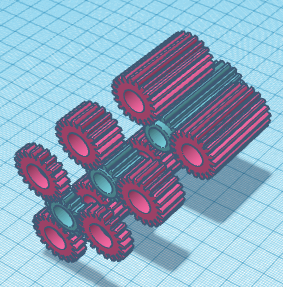
3. Torque. Even NEMA motor is not powerful enough. We need a reductor. No problem, except... Reductor has gears, and all we said about strong gears, axes and holders of gears and axes - applies. Do not follow designs you find online: in a planetary reductor, the slower the gearset spins, the thicker it should be. On the picture below, the inner gear is 3 times smaller than the outside "inverted" one, so i am making each following layer 3 times thicker:
... And so on. In other words, if you want to build strong robot, use steel, not 3d printer. If you still want to print one... Ok, I am going back to the topic in the next post.
Good luck :)